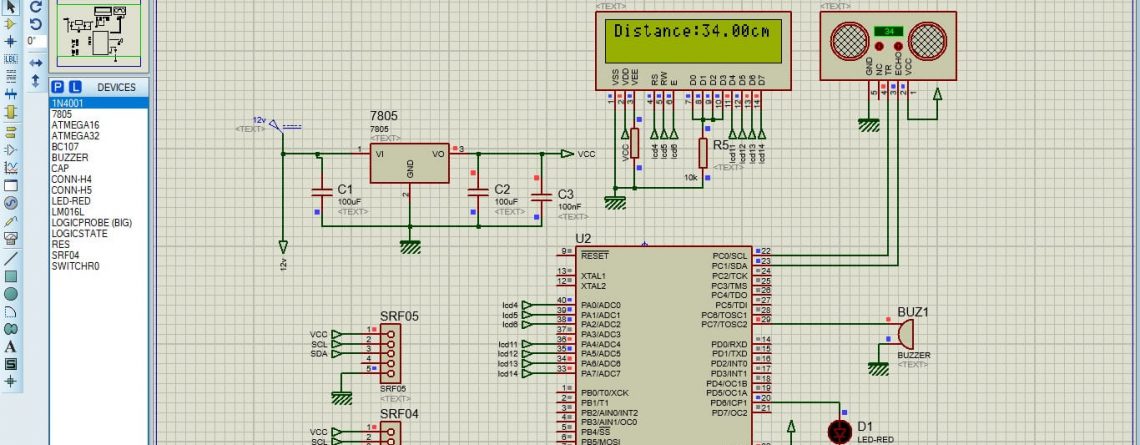
طراحی سنسور دنده عقب ماشین با قابلیت زدن بوق و نمایش میزان فاصله
برای فاصله سنجی در این پروژه از یک ماژول التراسونیک srf04 استفاده شده .این ماژول ها برای اندازه گیری فاصله, امواج صوتی با فرکانس بالا تولید و ارسال می کنند و موج بازتاب شده را دریافت می کنند. با اندازه گیری زمان ارسال تا دریافت امواج می توانیم فاصله مورد نظر را محاسبه کنیم. دو ماژول SRF04 و SRF05 تفاومت چندانی با هم ندارد و در واقع ماژول SRF05 ارتقاء یافته ماژول SRF04 می باشد. مسافت قابل سنجش توسط این ماژولها از 2cm تا 450cm می باشد.
این دو ماژول به گونه ای طراحی شده اند که می توان از انها بجای یکدیگر بدون نیاز به تغییر برنامه یا شماتیک پروژه استفاده کرد. در زیر تصویر این دو ماژول را مشاهده می کنید که تنها تفاوت ظاهری انها اضافه شدن یک پایه به نام OUT به ماژول SRF05 می باشد.
برای راه اندازی ماژول SRF05 دو مد وجود دارد, اما برای راه اندازی SRF04 یک مد یا روش وجود دارد که در ادامه مد یک و مد دو توضیح داده می شوند (مد یک برای راه اندازی هر دو ماژول می باشد و مد دو فقط برای SRF05 می باشد)
مد یک :
ماژول SRF05 دارای 5 پایه می باشد
- پایه VCC که باید به 5 ولت متصل شود
- پایه GND که به زمین (منفی تغذیه) متصل می شود
- پایه Trig
- پایه Echo
- پایه OUT
در ماژول SRF04 تعداد پایه ها 4 عدد می باشد و تنها تفاوت نسبت به SRF05 نداشتن پایه OUT است.برای راه اندازی در مد یک ابتدا باید به پایه Trig ماژول یک پالس به طول حداقل 10 میکرو ثانیه اعمال کنیم. در ادامه ماژول به طور خودکار 8 پالس با فرکانس 40K هرتز به محیط ارسال می کند. بعد از ارسال پالس ها توسط ماژول پایه Echo یک می شود و تا زمانی که پالس های برگشتی (بازتاب شده) را دریافت نکرده یک باقی می ماند. زمانی که ماژول پالس های برگشت شده را دریافت کرد پایه Echo دوباره صفر می شود.با اندازه گیری زمان رفت و برگشت پالس ها یا به عبارتی با اندازه گیری زمان یک بودن پایه Echo در ماژول با استفاده از تایمر در میکروکنترلر و قرار دادن زمان بدست امده در فرمولی که در ادامه گفته می شود می توان فاصله تا جسم را محاسبه کرد. در زیر دیاگرام زمانها را مشاهده می کنید:
پس از محاسبه زمان رفت و برگشت این زمان را بر 2 تقسیم میکنیم تا زمان رسیدن به مانع محاسبه شود . با توجه به اینکه سرعت امواج 340m/s است از رابطه x=vt به راحتی مقدار مسافت قابل محاسبه است .
مد دو
در این حالت از یک پایه برای تریگر و اکو استفاده می شود این حالت برای صرفه جویی در پایه های I/O ی میکروکنترلر یا هر سیستم دیگری طراحی شده است. برای استفاده از این باید پایه ی OUT به زمین وصل شود. و از پایه ی Echo برای تریگر و گرفتن پالس اکو استفاده می شود. نمودار برای استفاده از این حالت در عکس زیر مشخص است.
از لینک زیر میتوانید فایل برنامه نویسی و شبیه سازی این پروژه را دریافت نمایید .

دیدگاهتان را بنویسید